
ROBOT AUTONOMOUS PENCARI KORBAN BENCANA
Niken Syafitri, S.T., M.T., Ph.D.
Ratna Susana S.T., M.T.
Latar Belakang
- Waktu penyelamatan
Reruntuhan atau area kosong yang terjadi di area pasca-bencana dapat menunda waktu karena menghambat operasi pencarian dan penyelamatan. Konsekuensi: keterlambatan atau kegagalan dalam menyelamatkan nyawa para korban yang masih hidup. - Robot Kecil
Robot kecil yang dikerahkan dapat mempertahankan stabilitas bangunan dan reruntuhan di area pasca-bencana. Mereka dapat mempercepat operasi penyelamatan serta meningkatkan peluang korban untuk bertahan hidup. - Robot Non-Autonomous
Kebanyakan robot penyelamat tidak autonomous. Dalam operasi penyelamatan mayoritas menggunakan joystick yang dikendalikan oleh operator manusia.
Tujuan Penelitian
Implementasi Robot Autonomous menggunakan metode waypoint. Sistem robot sepenuhnya autonomous dengan memanfaatkan kemampuan robot dalam mendeteksi potensi keberadaan korban, kemudian posisinya akan dijadikan sebagai waypoint. Posisi korban digunakan sebagai input otomatis untuk metode waypoint robot.
Skenario Pengoperasian Robot
- Robot dinyalakan, GPS mendeteksi dan merekam posisinya
- Robot akan bernavigasi secara acak mencari korban
- Penghindaran tabrakan dilakukan menggunakan sensor inframerah
- Ketika mendeteksi pergerakan kecil di belakang reruntuhan atau suhu tubuh yang mengindikasikan korban, posisi akan dikirimkan ke pos SAR menggunakan divais LoRa
- Pencarian terus dilakukan sampai daya robot hampir habis, lalu robot kembali ke pos SAR
Kesimpulan dan Pengembangan
- Autonomous robot untuk mencari keberadaan korban bencana berhasil diimplementasikan
- Robot mampu bernavigasi di permukaan rata dan tidak rata, sesuai yang diperlukan di medan pencairan korban bencana
- Metode deteksi korban masih dapat ditingkatkan, selain masalah akurasi pembacaan GPS
- Pengembangan sistem multi-robot dan komunikasi antar robot dapat dikembangkan untuk pencairan korban yang lebih efisien.

PRODUK LIMBAH BOTOL KACA
Agung Pramudya Wijaya, M.S.n.
Ratna Susana S.T., M.T
Memanfaatkan limbah botol kaca dari berbagai jenis dan ukuran untuk dijadikan produk yang memiliki fungsi baru dengan nilai tambah yang tinggi
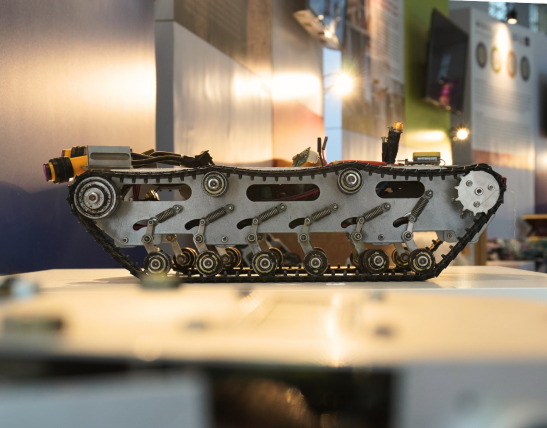
ROBOT AUTONOMOUS PENCARI KORBAN BENCANA
Niken Syafitri, S.T., M.T., Ph.D.
Ratna Susana S.T., M.T.
Robot sepenuhnya autonomous dengan mendeteksi korban dan menjadikan posisinya sebagai waypoint untuk navigasi.

CORKSEAT AND CORKPILLOW SERIES
Maugina Rizki Havier, M.Ds.
Merupakan seri produk interior yang dihasilkan dari eksplorasi bahan kain corkwood yang biasa ditemukan pada industri sepatu lokal di Bandung.

ITENAS SERGAP SENYAP ELECTRIC VEHICLE
Prof. Ir. Tarsisius Kristyadi, S.T., M.T., Ph.D., IPM.
Kendaraan listrik yang dikembangkan oleh Institut Teknologi Nasional (Itenas) Bandung untuk keperluan pertahanan militer.

PENGEMBANGAN INDUSTRI KREATIF BERBAHAN BAKU BONGGOL JAGUNG
Dr. Andry Masri, M.Sn.
Inovasi pengolahan bonggol jagung menjadi bahan produk pakai ini pertama di dunia, berawal dari materi pengajaran Desain Produk FAD Itenas.
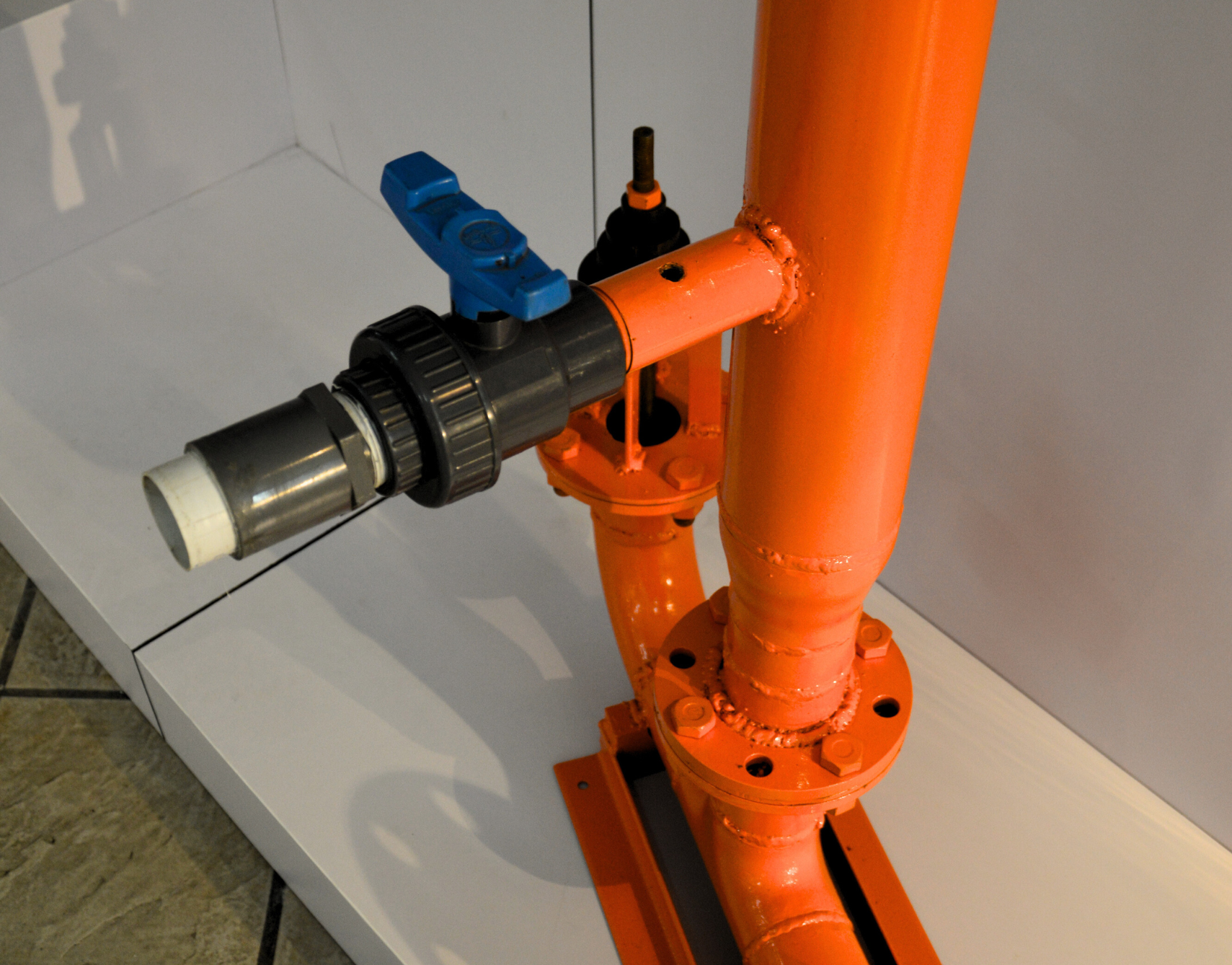
HYDRAULIC RAM PUMP
Muhammad Ridwan, S.T., M.T.
Ferry Hidayat, S.T., M.T.
Pompa Hidram adalah pompa yang memanfaatkan energi aliran air turun untuk memompa air ke ketinggian melebihi sumbernya.

PENERAPAN TEKNIK STILASI PADA MOTIF RAGAM HIAS SEBAGAI METODE PENINGKATAN KEMAPUAN KREATIF PELAKU USAHA IKM ALAS KAKI
Mohamad Arif Waskito, S.Sn., M.Ds.
Asep Nana Hermana, S.T., M.T.
Pengembangan gagasan desain untuk IKM alas kaki.
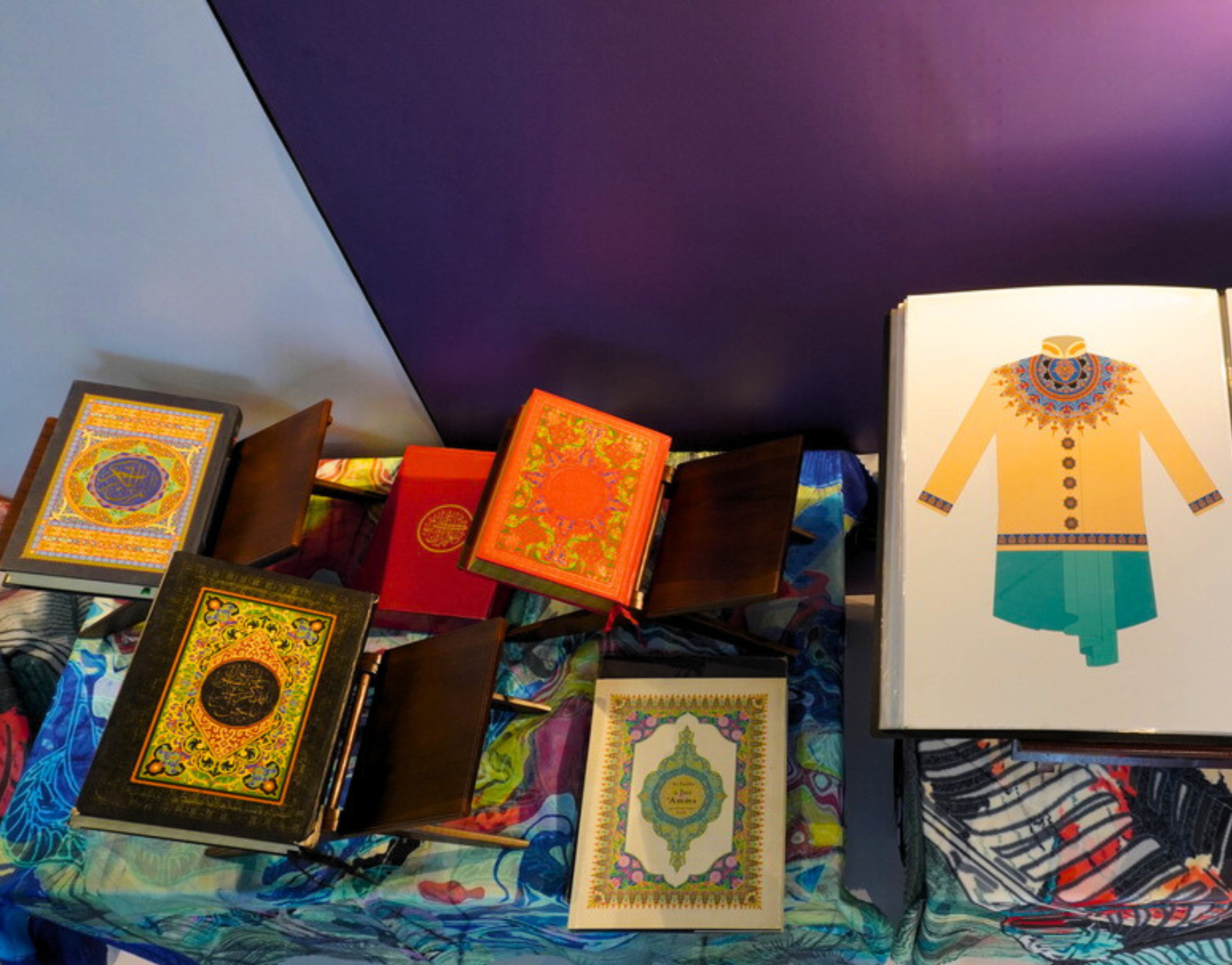
SENI MUSHAF AL QUR’AN
Aris Kurniawan, S.Sn, M.Sn.
Seni mushaf Al-Qur’an beriluminasi mencerminkan kekayaan ornamen budaya Nusantara, melestarikan tradisi kultural Islam, dan diharapkan menjadi simbol kebangkitan umat Islam kini dan mendatang.

EKSPLORASI DESAIN MODUL AKUSTIK HYBRID-DIFFSORBER BERBAHAN DASAR LIMBAH KERTAS
Detty Fitriany, M.T., M.Sn.
Bambang Arief R.R.Z., M.Sn.
Memanfaatkan limbah kertas sebagai material akustik hybrid-diffsorber yang murah, ramah lingkungan, dan estetis.

PENINGKATAN KUALITAS DESAIN DI IKM ALAS KAKI MELALUI PEMANFAATAN TEKNOLOGI DIGITAL
Mohamad Arif Waskito, S.Sn., M.Ds.
Asep Nana Hermana, S.T., M.T.